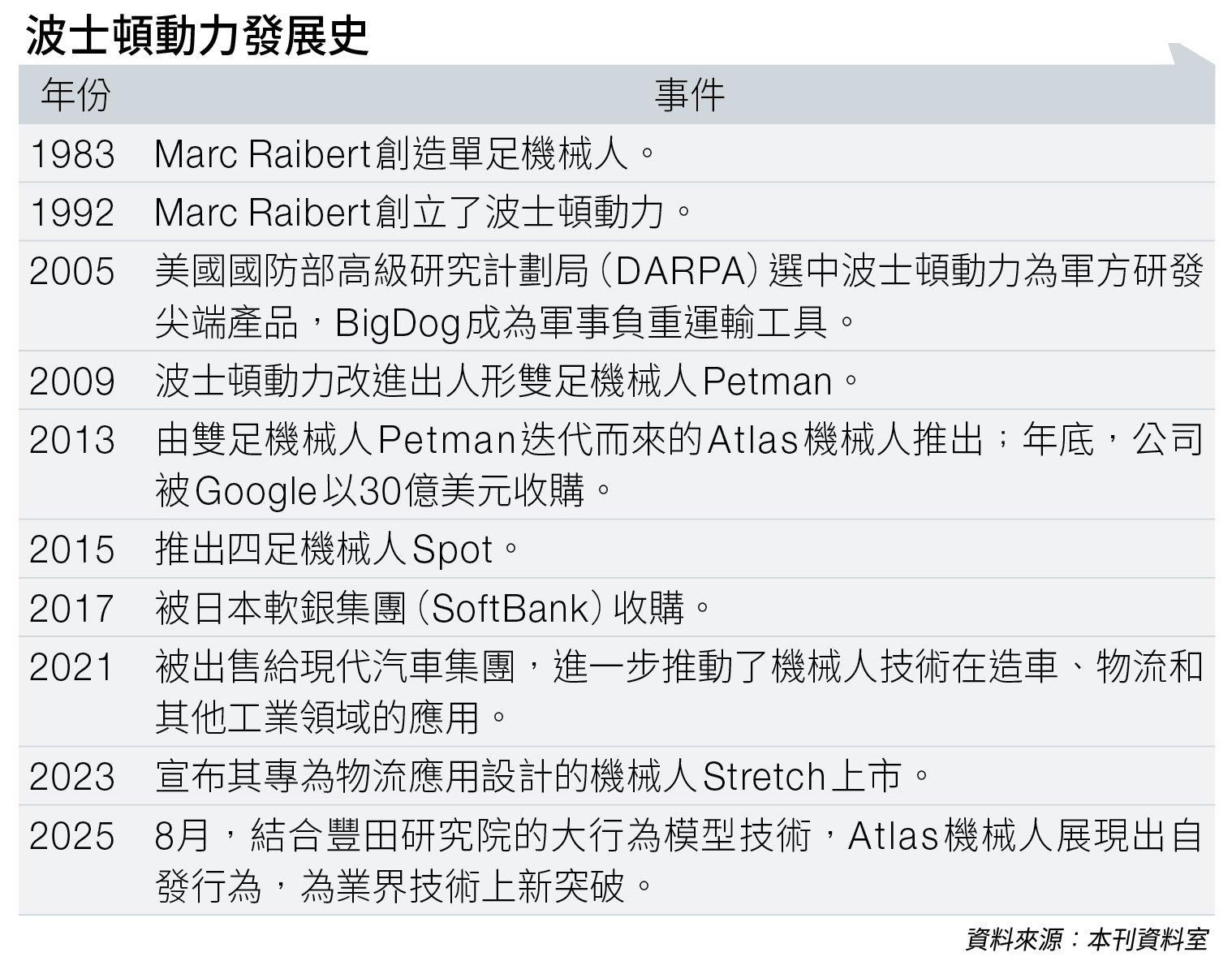
機械人先驅波士頓動力 商業化之路反超業界


波士頓動力的始創人Marc Raibert,1949年出生於美國,在東北大學獲得了電氣工程學士學位;1977年,他在麻省理工學院(MIT)獲得博士學位,論文主題就是探索如何使用機械人技術模擬生物行為。
在學術生涯早期,Marc Raibert分別在卡內基梅隆大學和麻省理工學院擔任教授。早在1983年他就造出了一個單足機械人,只能蹦跳移動,但平衡性極好,機動能力也很強。
後來,Marc Raibert又造出一個四足機械人,就是BigDog的雛形。
與SONY合作開發機械狗
1986年,Marc Raibert擔任麻省理工學院電子工程與計算機科學系的教授,並將他在卡內基梅隆大學創立的,主要研究與機械人相關的控制、機械視覺方面技術的CMU leg實驗室,搬到了麻省理工,孵化出波士頓動力公司的雛形。
1992年Marc Raibert創立波士頓動力。當時他曾考慮將其發展為一家建模公司,直到與索尼(SONY)合作開發AIBO機械狗和QRIO小型人形機械人後,徹底改變了公司的發展方向。
Marc Raibert在機械人領域最大的貢獻,是對動態平衡控制算法的開創性研究。此前,多數機械人都採用靜態平衡法,需要保持重心始終位在支撐面內,Marc Raibert則借鑒動物運動,開創了突破性的動態平衡算法。
在成功解決單腿平衡問題後,Marc Raibert將研究拓展到雙足和四足機械人,他發現,多足機械人可通過虛擬腿模型來簡化控制,即使是複雜的四足機械人,在奔跑時也可當成單腿模型,大大簡化了控制算法。
這種思路引領波士頓動力開發了一系列機械人,從BigDog到Atlas,再到Spot和Handle,每一代產品都在動態控制、平衡能力和環境適應性方面取得了顯著進步。
起初波士頓動力主要服務美國軍方,得到美國國防高級研究計劃局(DARPA)的大力支持,並獲得軍方千萬美元的投資。
期間公司推出了許多產品,包括四足機械人BigDog、阿爾法狗LS3、四足機械人Cheetah(獵豹)和可自由跳躍旋轉的Wildcat(野貓)等。
軍方支持被Google收購
首先是2005年的BigDog,高約一米,重約109公斤,可以背負45公斤重物行走或奔跑,最高移速每小時6.4公里,負重時仍能對人類從其側面的腳踢做出靈敏反應,不會被踹倒,主要用於為美軍背負裝備、運輸物資。不過因噪音太大,無法在戰鬥中使用,項目中止。
之後,在美軍支持下,波士頓動力開始重點投入研發雙足機械人,2013年,由雙足機械人
Petman迭代而來的Atlas原型機亮相。
同年年底,波士頓動力被Google以30億美元收購,繼續改良人形機械人Atlas和Spot系列機器狗。
被收購第三年後,新一代Atlas正式亮相,摒棄了傳統的接線供電,採用激光雷達和機器視覺實現了自主導航、定位和行走。
期間,波士頓動力推出了早期的Spot四足機械人,實現了低噪運行,可原地跳躍與摔倒,還可以靈活上落樓梯。
之後推出Spot Mini,重量僅25公斤,比
Spot更加小巧輕便,並在頭部增設了一幅機械臂,可以靈活操控物體。
邁出商業化一步
考慮到波士頓動力的尖端技術依然離落地變現有不小距離,三年後的2017年,Google將波士頓動力出售給軟銀。
在充足的資金支持下,波士頓動力開始將研究成果進行商業化。從2016年至2020年間,Atlas迅速優化,保持穩定性的同時,體積也更小,外觀愈來愈酷炫,動作也靈活了很多。
2018年,Atlas學會了跑步,能跨越障礙物,躍上寬闊的台階;翌年,它已經能連續跳躍、翻滾和倒立。
作為一家典型的學院派創業公司,波士頓動力也著重技術發展而輕視了商業化落地,Marc Raibert對研發機械人的追求勝於對盈利的渴望。他曾表示,「沒有經歷至少25年潛心研究的機械人產品,不足以商業化。」
2019年公司推出商業版四足機械人Spot,終於在長達27年之後,這家研究型的公司轉向了產品導向。Spot被用於建築檢查、油氣管道巡檢、核電站檢測等領域。
2020年6月,波士頓動力邁出了商業化重要一步。Spot Mini以74,500美元的價格發售,可應用於警署、石油公司、機場建築工地,還能充當雪橇犬、牧羊犬。
2020年底,現代汽車集團(Hyundai Motor Group)以9.21億美元價格接手波士頓動力,直到2021年6月才完成收購。2022年9月,雙方宣布初始投資逾4億美元,啟動新的人工智能研究所。
然而,現代汽車2023年財報披露,收購波士頓動力後年均研發投入仍維持在2億美元高位,而商業化收入僅1,800萬美元。
其中美國空軍採購的Spot機械狗軍用訂單貢獻不足200萬美元;其餘90%收入來自實驗室技術演示服務。
現階段全球人形機械人之爭,已進入商業化階段。而波士頓動力在今年8月,結合豐田研究院(Toyota Research Institute)的大行為模型技術,Atlas機械人展現出自發行為,讓機械人能以更貼近人類的方式控制身體,預示著機械人技術或將迎來突破性進展。這個機械人界的先驅,大面積商業化變現的前路又踏出一步。